駐車場設計シリーズの続編として、今回は立体駐車場のスロープ設計について解説します。
※本記事では、理解しやすさを重視したカジュアルな名称を使用しています。正式な構造名称とは異なる点にご注意ください。
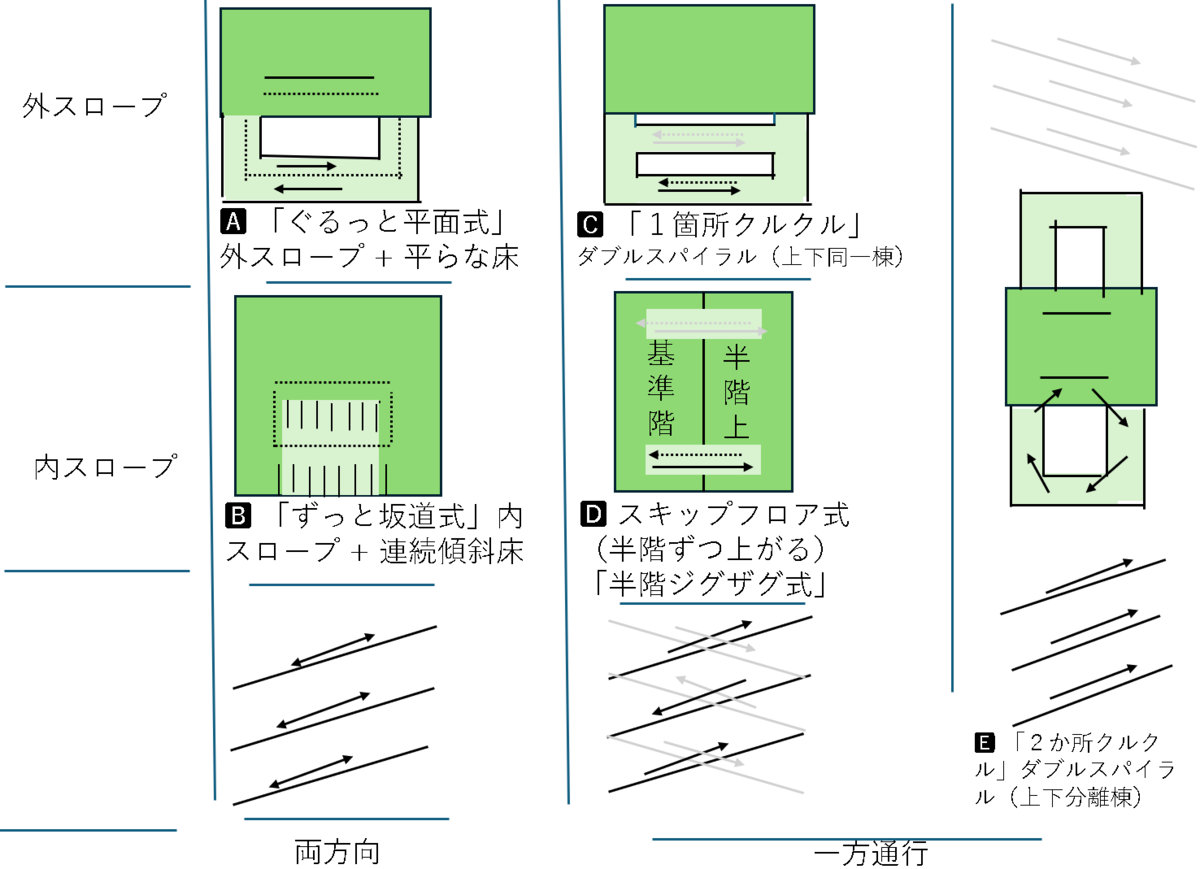
スロープ構造の5つの基本パターン
| 記号 | 通称(カジュアル名) | 構造概要 | メリット | デメリット |
|---|---|---|---|---|
| A | ぐるっと平面式 | 外スロープ+平面フロア | ・シンプルな構造 ・逆走が発生しにくい |
・広い土地が必要 ・各フロアで車両交差による混雑 |
| B | ずっと坂道式 | 内スロープ+連続傾斜床 | ・土地効率に優れる ・逆走が発生しにくい |
・スロープ上駐車による見通し悪化 ・フロア出入時の混雑発生 |
| C | 半階ジグザグ式 | スキップ式構造 | ・高い土地効率 ・上下動線の分離が容易 |
・現在位置の把握困難 ・複雑動線による逆走リスク |
| D | 敷地まるごと一方通行式 | 敷地回遊による上下動線完全分離 | ・上下完全分離で逆走防止 ・シンプルな動線 |
・最大の土地面積が必要 ・建物との連携感が希薄 |
| E | クルクル別ルート式 | ダブルスパイラル型(建物内) | ・上下完全分離で混雑回避 ・直感的でシンプルな動線 |
・目的階アクセス制約 ・部分的な逆走リスク |
立地特性による選択傾向
駅前・都市部での選択パターン
主流:B(ずっと坂道式)、D(敷地まるごと一方通行式)
理由:
- 限られた土地の有効活用が必須
- 高い処理能力への要求
- 歩行者との接触リスク最小化
郊外・ロードサイドでの選択パターン
主流:A(ぐるっと平面式)、C(半階ジグザグ式)
理由:
- 比較的広い土地の確保が可能
- 利用者の駐車技術レベルを考慮
- 建設・維持コストの抑制
E(クルクル別ルート式)が少ない理由
構造的制約
- 土地面積の要求:D型と同等以上の敷地が必要
- 出入口分離:利用者の直感的理解を阻害
- 建設コスト:複雑な構造による高コスト
運用面での課題
- 初回利用者の混乱
- メンテナンス性の複雑化
- 緊急時対応の困難さ
選択基準:3つの重要要素
1. 駐車台数(収容能力)
- 大容量対応:B型、C型が有利
- 中規模対応:A型、D型で対応可能
- 小規模対応:全パターンで選択可能
2. 時間当たり処理能力
- 高処理能力要求:D型、E型が最適
- 中程度処理能力:A型、B型で対応
- 低処理能力対応:C型でも十分
3. 逆走防止の重要度
- 逆走絶対防止:D型、E型を優先
- 逆走抑制重視:A型、B型を選択
- 逆走許容範囲:C型も選択肢
まとめ
立体駐車場のスロープだけで、どれだけの設計者さんの思いがあるか分かりますね。